Many manufacturers are seeking to benefit their operations by integrating cobots into one or more of their manufacturing workcells. Manufacturing management wants assurance that the cobot-integrated workcell will quickly deliver a high return on investment. You’ll deliver a better ROI if you choose a workcell that will deliver the greatest benefit from cobot integration. But how do you identify that “best” workcell?
Let’s look at advice from experts, starting from quick but less accurate approaches to more time-consuming but more accurate approaches.
The “Past Experience” Approach
In a recent survey (from TechSolve, Inc.), manufacturers said that cobots have worked successfully with the following workcell types: part loading and unloading, cleaning of parts, pick-place-orient-pack parts, packaging, welding, assembly, inspection, and any repetitive operation. The same survey revealed that workcell tasks that are boring and/or dangerous should be given high consideration for robot automation.
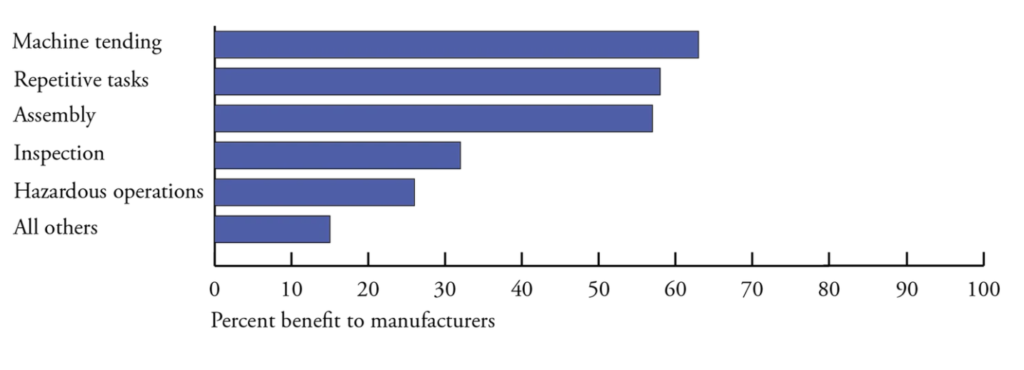
In another survey from TechSolve, the perceived percent benefit to a group of manufacturers performing a broad set of cobot-integrated manufacturing workcell tasks is shown below.
Small to medium-sized manufacturers (SMMs) can make use of the past-experience approach to decide what workcell to select for their first or next cobot system implementation.
The “Complexity-Impact Quadrant” Approach
A step-up in complexity has SMMs identifying candidate workcells exhibiting the highest levels of both “high impact” and “simplicity” (from Robotiq, Inc.).
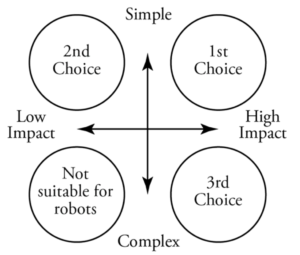
Application criteria for simplicity consists of elements such as the workcell task, manipulation requirements, process consistency, part variation, precision, integration, cycle time, and cost. Application criteria for impact consists of elements such as volume, part value, health & safety, work-in-process, production, cycle time, and quality. The skill-level of the current workforce at each stage in the candidate workcell is also factored in to determine the suitability of each candidate workcell for cobot integration. SMMs finally select workcells with the highest levels of both impact and simplicity.
The “Key Elements Weighting” Approach
In this approach, an SMM estimates the importance of each one of a comprehensive set of key elements to be considered when integrating a cobot-based system into one or more candidate workcells. The categories of elements suggested by experts consist of performance, usage, workforce, financial, and miscellaneous. This approach is thorough, and therefore might take a significant amount of time for an expert, or a team of experts, to complete. Elements considered of lesser importance can be trimmed in pursuit of timeliness.
To make a good assessment for a work cell, manufacturing experts need a reasonably accurate estimate of weights for each key element in each candidate workcell, based on that element’s relative importance, allowing for both negative and positive weightings. Then all weights can be summed up to get a final score for each candidate workcell.
Obviously, the workcell with the highest scores, will be the workcell that will most likely to produce the best return on investment. Manufacturers/integrators might ignore several of these elements and add other elements, as they see fit.
Here are those key elements in the various categories:
A: Key elements for performance, e.g., padding on cobot arms and eye safety might still be required with a cobot, along with safety measures such as fencing/light curtains, which can also result in low operating speeds or multiple stops, if humans are detected in certain parts of the workcell
-
- Safety for and desirability from humans to work at the workcell
- Number of operations per unit time
- Available shop floor footprint for the robotic system
- Reach of the cobot adequate to the task or tasks
- Accuracy of cobot arm motion throughout the entire reach of the cobot
- Repeatability of cobot arm motion throughout the entire reach of the cobot, and its relevance to the task
- Maximum payloads allowed per cobot compared to human accuracy/precision (including humans with exoskeletons) per the required payloads
- Cobot arm speed adequacy to the task
- Cobot system longevity
- Chosen end effector (gripper) grasping and moving effectiveness for given part types or material
- Cobot works for many types of use cases (e.g., material handling, machine tending)
- Minimum and maximum part feature size resolution of cobot gripper and tools satisfies the requirements of the workcell tasks
- Ability to adapt to widely and frequently varying production requirements, i.e., system agility
B: Key elements for usage
-
- System setup, cobot integration, reconfiguration, programming, reprogramming, programming complexity, hardware changeovers, relocation, testing, maintenance, handling multi-product changeovers and mixes, and use (programming or reprogramming is typically given high importance)
- Cost of learning and integrating one or more computing languages, computer programs, and hardware interfaces (e.g., PLCs, HDMI, USB, and software languages), with the understanding that cobot technology is relatively simple to integrate and program
- Human decision-making requirements in the workcell
- If vision sensors are required on or near the cobot: requirements and cost of vision system setup and reprogramming
- Duration of downtime prior to successful workcell operation
- The proposed cobot system automates more workcells than one
- Robust with respect to damage, e.g., are the parts under test expensive and fragile?
- Key elements for workforce
- Technical suitability of manual operators for maximum desired production volumes for the candidate workcell
- Danger to workers of the candidate workcell operation
- Boredom of workers for the candidate workcell operation
- Resistance of workers to learn programming languages
- Resistance of maintenance workers to learn robot system maintenance
- Ability of maintenance workers to learn to work with the cobot
- Availability of local maintenance/service experts
- Availability of cobot system integrators
- Distributers and resellers are often motivated to help and perform demos
- Type and level of skill gaps in current workforce (higher skills imply greater benefit with cobots)
- Workers’ union resistance
C: Key elements for financial
-
- Lifecycle costs of cobot with human compared to just a human worker
- SMM’s budgeted amount for the whole cobot integration project compared to the prorated cost of the total cobot system project
- SMM’s level of risk tolerance
- Time to full ROI. When generating the ROI, make sure it is done holistically, which may imply that using cobots may not the best solution, or may reveal that a manual solution or non-robotic automation solution will be the faster, better, cheaper, and safer solution. Common experience reported by seasoned robot system integrators are that ROI can typically be reached within 14 months and SMMs should budget around 3 times the price of the cobot system to cover integration costs, however, some MEP experts have experienced as little as 1/2 to 1 times the cost of cobot for development, fixturing, end effectors and deployment
- Availability and variety of leasing options and payment plans
- Product bundles availability
- Availability of application-specific packages for the cobot system
D: Miscellaneous key elements
-
- Study what the SMM’s business is, study each workcell and start with a simpler workcell operations since there is a significant non-technical danger in picking the “wrong” workcell
- Use “right and ready” assessment document from South Dakota MEP
- Favor starting with a simpler workcell operations since there is a significant non-technical danger in picking the “wrong” workcell
- Part of a community of users/researchers
- Number and magnitude of process changes in each workcell
- Number and magnitude of product changes in each workcell
- Ensure that enough monies are available to be allocated before deploying the cobot
- Cobot system has been “mainstreamed” or widely used
- Availability of tooling and accessory options
- Scalability requirements to support automation growth over the long term
- Cost of delaying the move to cobot technology
- Compliant to standards
SMMs could also choose a subset of all the candidate workcells, using the “past experience” approach, and then apply the more complex approaches (“complexity-impact quadrant” and “key elements weighting”) to that smaller set of candidate workcells. This approach would save time and still discern the workcell(s) that will return a good ROI.
Acknowledgements: Most of the content in this document was developed from the input and experience from the following organizations and individuals: TechSolve (Mark Huffman, Susan Moehring, Radu Pavel), Catalyst Connections (Matt Minner), South Dakota Manufacturing & Technology Solutions (Keith Deibert, Wes Kelly), and the Cleveland MAGNET (Mike Pintz, Joe Work, Mike O’Donnell, Nick McClellen).
John Horst is a project team leader in the Intelligent Systems Division at NIST: National Institute of Standards and Technology.